We are used to working on AEB requirements by Euro NCAP. This has never been much of a topic for the lighting community. Tests include car to pedestrian, car to bicycle, and car to motorcyclist, with maximum speed 60 km/h. ⅔ of the points are obtained by day, and the others by night. The night tests include street lights and low beams. Camera detection isn’t a big issue with street lights helping, and so low beam performance is not crucial.
Only one night test was done without streetlight, but with high beams on, with maximum speed 60 km/h for AEB and 80 km/h for front collision warning and emergency steering support. The detection task doesn’t call for a wide high beam, because the pedestrian is in front of the car. With a normal high beam with a range of 150 metres, you have time to detect and decelerate to avoid a collision.
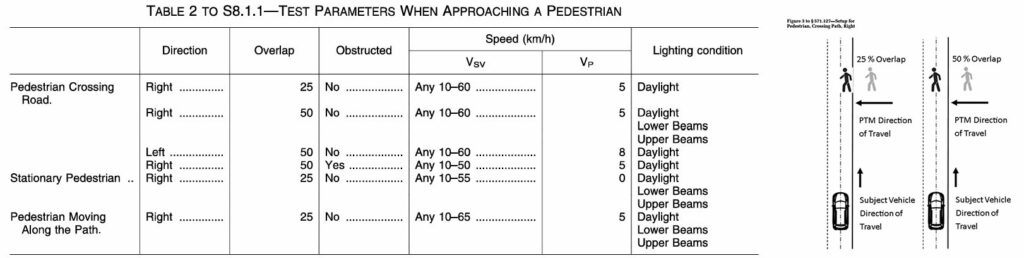
In terms of lighting, the main difference with FMVSS 127 is pedestrian detection by night (vehicle detection at night is easier because vehicles have their own lights, or at least retro-reflectors). Speeds are similar, but the night scenarios are without any streetlight, and with low beam as well as high beam. And there are crossing scenarios, not just longitudinal pedestrian movement.
100-metre high beam range and a vehicle speed of 60 km/h, that’s a 6-second preview (time to collision). A pedestrian moving at 5 km/h would have moved 10 metres over those 6 seconds. So to detect the pedestrian, the car would need a high beam spanning ±5 degrees—and the U.S. high beam spread requirement is much wider, so all should be fine.
The low-beam scenario is the tough one. Where’s the pedestrian? Coming from the right side or the left side? How can I be sure it is a pedestrian? What is the camera’s reaction time? How to avoid false detection and false braking? Should we change the low beam pattern to put even more light out to the sides and on the left than they already do (which is contributing to increasingly loud and voluminous glare complaints)? 1g deceleration—maximum brake force—at 60km/h is equivalent to a movement distance around 30 metres, not including reaction time. Camera reaction time (by night for vehicle recognition + high beam to low beam switch) in SAE J3069 was estimated at 2.5 seconds (NHTSA believes 1 second). At 60 km/h, this means another 40 metres. Pedestrian detection should then be done at 70 metres—longer if the vehicle is to brake smoothly; who wants a car decelerating automatically at 1G? The test seems passable with low beam if there’s enough light in the right zone.
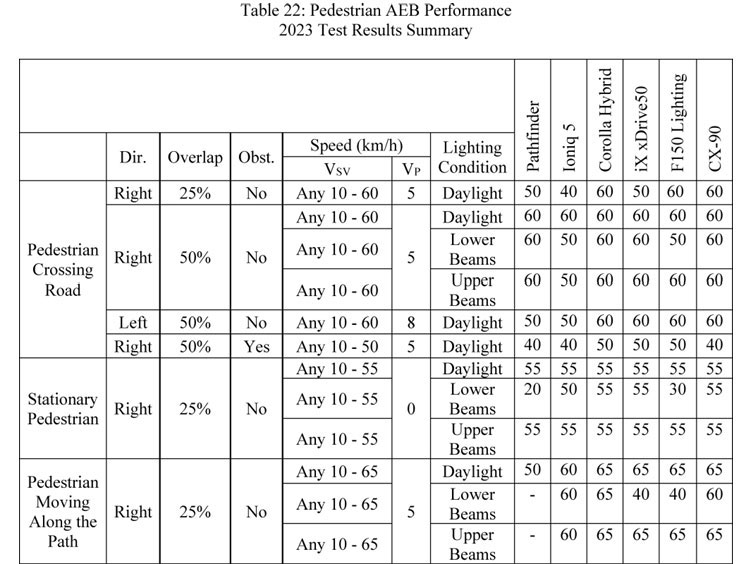
In their rationale, NHTSA describes tests showing some vehicles have succeeded in fulfilling all the tests, and some others failed at 20 km/h. NHTSA interprets this as meaning their regulation is feasible with current sensor setups, even if vehicles have not been developed to fulfil the requirements.
If ADB was clearly mentioned in the test scenario, it would have been easier to detect the pedestrian from the side for sure. But it is not written like that. Good headlamps and close collaboration between lighting and ADAS teams will be key to meet FMVSS 127’s requirements. It is our chance to collaborate more closely.